Point-NeRF: Point-based Neural Radiance Fields

Neural Point-Based Graphics [ECCV22]
与Point-NeRF类似,但点云是作为一个输入,而非优化得到
Dual Octree Graph Networks for Learning Adaptive Volumetric Shape Representations
Shape As Points A Differentiable Poisson Solver
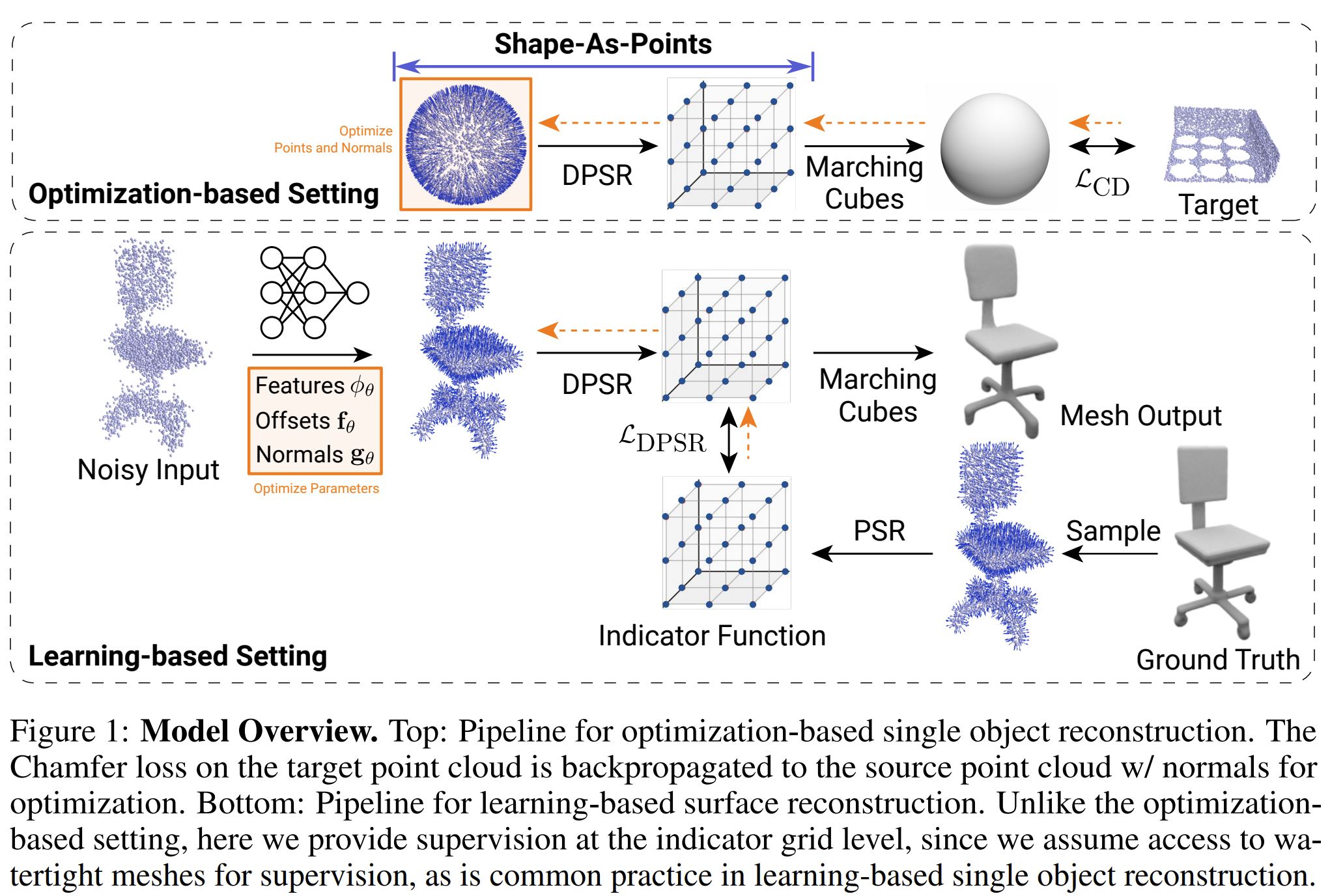 将泊松重建指示函数场的过程可微分化。相比神经网络隐式场的方法不需要存储网络参数。
[PDF]
[Supp]
[Code]
将泊松重建指示函数场的过程可微分化。相比神经网络隐式场的方法不需要存储网络参数。
[PDF]
[Supp]
[Code]
LEARNING TO EXPLORE USING ACTIVE NEURAL SLAM
留作参考 [PDF] [Project Webpage]
SparseNeuS: Fast Generalizable Neural Surface Reconstruction from Sparse views [Project]
 类似地,
Neural Sparse Voxel Fields [NIPS20]: octree的NeRF
类似地,
Neural Sparse Voxel Fields [NIPS20]: octree的NeRF
PREVIOUSPaper Reading
NEXTPaper Reading