Vis2Mesh: Efficient Mesh Reconstruction from Unstructured Point Clouds of Large Scenes with Learned Virtual View Visibility [ICCV21]
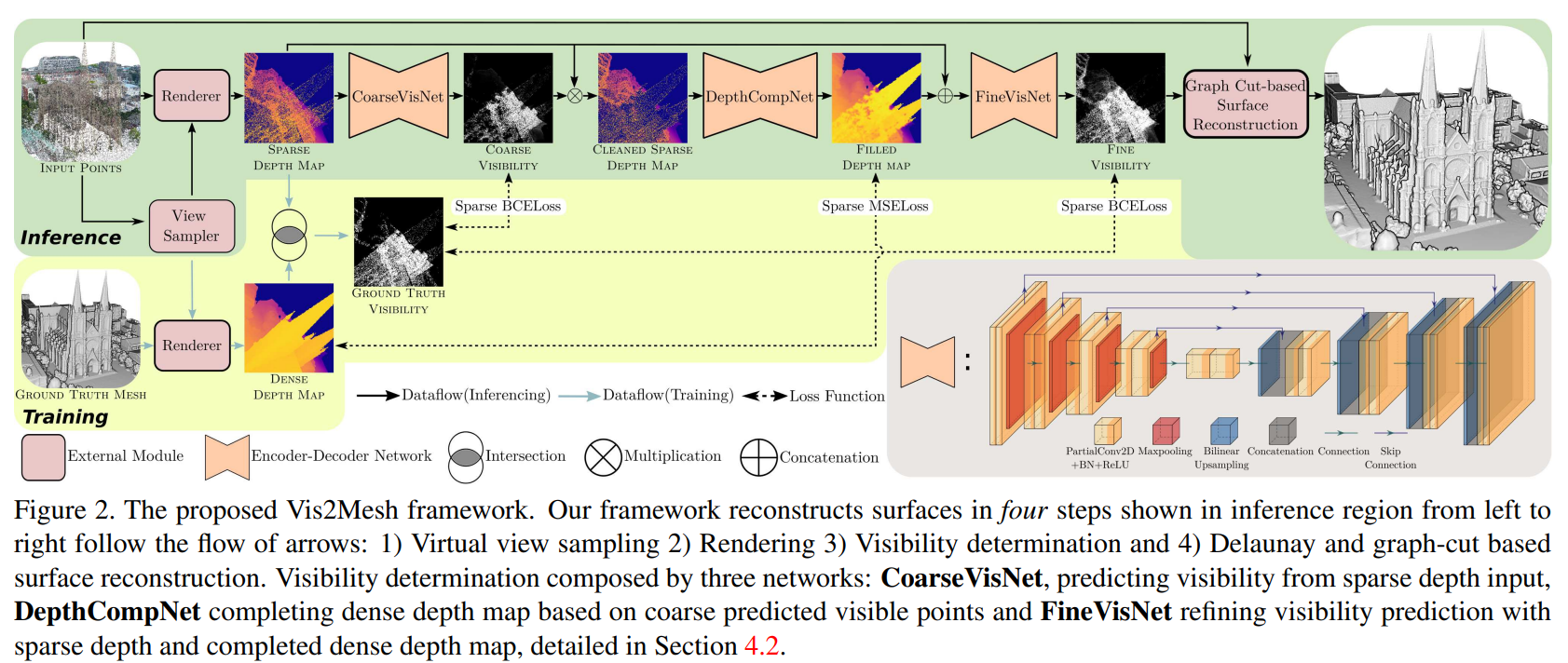
用gt深度图作为监督,学习随机生成的虚拟视角到输入点云的可见性(先以深度图的形式),以此来进行点云重建。
Next-Best View Policy for 3D Reconstruction [ECCV20]
强化学习的NBV
ShAPO: Implicit Representations for Multi-Object Shape, Appearance, and Pose Optimization [ECCV22]
Gradient-based Point Cloud Denoising with Uniformity [arxiv]
沿预测的法向移动点来去噪。引入均匀性的用法解释不合理
SeedFormer: Patch Seeds based Point Cloud Completion with Upsample Transformer [ECCV22]
Cross-Modal 3D Shape Generation and Manipulation [ECCV]
一个latent space后连接不同模态,通过改变共同latent space中的latent code实现跨模态操作和生成
Rethinking Sim2Real: Lower Fidelity Simulation Leads to Higher Sim2Real Transfer in Navigation [arxiv]
PREVIOUSPaper Reading
NEXTPaper Reading